|
일본 리츠메이컨대학 로봇과학자들이 인간-곤충 간 상호작용이 가능한 햅틱 원격제어시스템(haptic teleoperation system)을 개발했다고 'IEEE 스펙트럼'이 지난 24일(현지 시각) 보도했다.
이 시스템은 마이크로 핑거(micro finger)를 사람 손에 착용하는 햅틱 장치와 연결해 곤충에 가해지는 힘을 전달받을 수 있다. 연구팀은 작은 벌레 크기의 쥐며느리’(pill bug)의 배를 마이크로 핑거로 만지면서 사람의 햅틱 장치로 전달하는 시연을 성공적으로 실행했다.
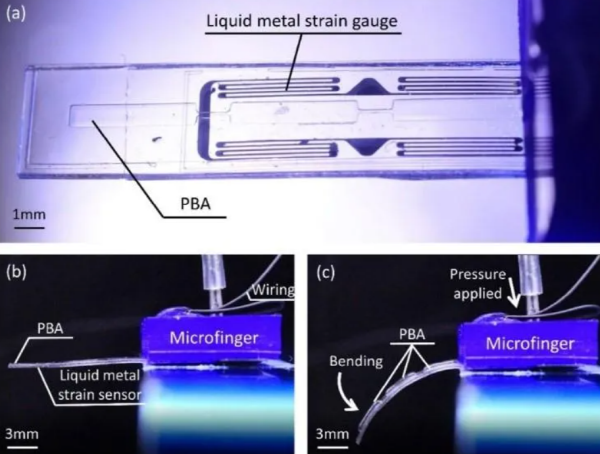
연구팀이 개발한 마이크로 핑거는 길이 12mm, 너비 3mm, 두께 490μm다. 마이크로 핑거는 공기로 압력을 가할 수 있는, 안이 비어 있는 채널을 갖고 있는 공압식 풍선 액추에이터다. 마이크로 핑거의 상단에 비어 있는 채널이 있기 때문에 채널이 부풀어 오르면 마이크로 핑거가 아래로 휘어지고, 압력이 감소하면 원래 위치로 돌아간다.
마이크로 핑거에 있는 별도의 채널은 액체 금속으로 채워져 있다. 마이크로 핑거가 구부러지면서 채널이 길어지면 액체금속이 얇아진다. 액체금속의 저항을 측정하면 핑거가 얼마나 구부러졌는지 알 수 있다.
| |
 |
|
| ▲ 마이크로 핑거와 햅틱시스템 |
| |
 |
|
| ▲ 마이크로 핑거의 작동 원리를 설명한 이미지 |
연구팀은 액추에이션과 힘 감지(force sensing)의 조합을 통해 힘 피드백 인터페이스(force feedback interface) 기반의 햅틱시스템을 만들었다. 사람이 손가락을 움직이면 마이크로 핑거가 움직이고, 곤충에 가해지는 힘은 사람의 손에 전달된다. 사람은 손가락을 통해 마이크로 핑거가 전달하는 힘을 전달받을 수 있다.
연구팀은 이처럼 작은 로봇을 만들고 곤충 수준의 감지 능력과 이동성을 갖춘다면 곤충으로부터 보다 많은 것을 배울 수 있을 것으로 보고 있다. |
















